07. Feature Matching
- 산업인공지능학과 대학원 2022254026 김홍열
Feature Matching이란
- 컴퓨터 비전 및 이미지 처리 분야에서 두 이미지 간의 유사한 특징을 찾는 과정
- 두 이미지 간의 관계 (예: 동질성 행렬, 기본 행렬)를 추정하거나, 특정 객체의 위치와 자세를 찾아내는 데 사용
- 객체 인식, 이미지 스티칭, 3D 재구성 등 다양한 응용에서 활용
Featrue Matching 과정
- Feature Detection (특징 검출)
- 각 이미지에서 특징점 (코너, 블롭 등)을 검출
- ex) SIFT, SURF, ORB, FAST, Harris Corner Detector 등
- Feature Description (특징 기술)
- 각 특징점 주변의 정보를 기술자(descriptor)로 변환
- 기술자는 해당 특징점의 고유한 정보를 포함하며, 다른 이미지의 특징점과 비교할 때 사용
- ex) SIFT, SURF, ORB 등
- Feature Matching (특징 매칭)
- 한 이미지의 특징 기술자와 다른 이미지의 특징 기술자를 비교하여 유사한 특징들을 검출
- ex) Brute-Force 매칭, FLANN 기반 매칭
- Outlier Removal (이상치 제거)
- 매칭 과정에서 잘못된 매칭을 이상치(outliers)라고 하며, 이를 제거하는 과정
- ex) RANSAC, LMEDS 등
예제 코드¶
Harris Corner
void corner_fast()
{
Mat src = imread("building.jpg", IMREAD_GRAYSCALE);
if (src.empty())
{
cerr << "Image load failed !" << endl;
return;
}
vector<KeyPoint> keypoints;
FAST(src, keypoints, 60, true);
Mat dst;
cvtColor(src, dst, COLOR_GRAY2BGR);
for (KeyPoint kp : keypoints)
{
Point pt(cvRound(kp.pt.x), cvRound(kp.pt.y));
circle(dst, pt, 5, Scalar(0, 0, 255), 2);
}
imshow("src", src);
imshow("dst", dst);
imwrite("dst1.png", dst);
waitKey(0);
destroyAllWindows();
}


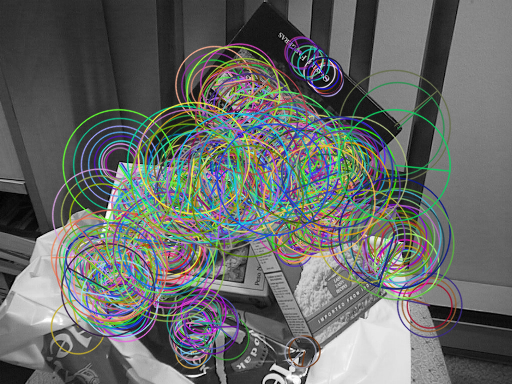
ORB
void detect_keypoints()
{
Mat src = imread("box_in_scene.png", IMREAD_GRAYSCALE);
if (src.empty())
{
cerr << "Image load failed !" << endl;
return;
}
Ptr<Feature2D> feature = ORB::create();
vector<KeyPoint> keypoints;
feature->detect(src, keypoints);
Mat desc;
feature->compute(src, keypoints, desc);
cout << "keypoints.size(): " << keypoints.size() << endl;
cout << "desc.size(): " << desc.size() << endl;
Mat dst;
drawKeypoints(src, keypoints, dst, Scalar::all(-1), DrawMatchesFlags::DRAW_RICH_KEYPOINTS);
imshow("src", src);
imshow("dst", dst);
imwrite("dst2.png", dst);
waitKey();
destroyAllWindows();
}
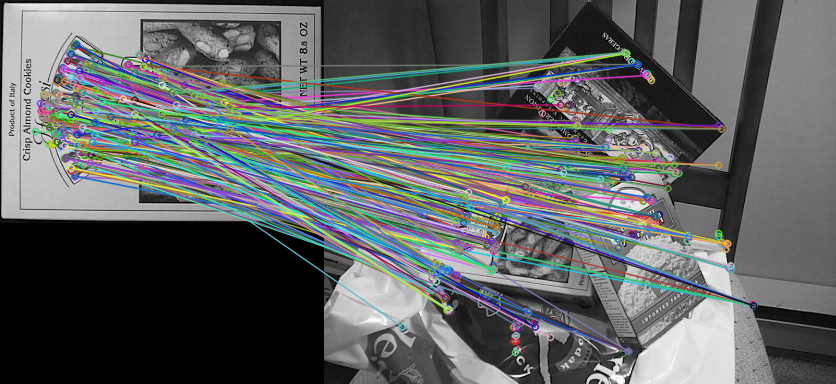
ORB Matching
void keypoint_matching()
{
Mat src1 = imread("box.png", IMREAD_GRAYSCALE);
Mat src2 = imread("box_in_scene.png", IMREAD_GRAYSCALE);
if (src1.empty() || src2.empty())
{
cerr << "Image load failed !" << endl;
return;
}
Ptr<Feature2D> feature = ORB::create();
vector<KeyPoint> keypoints1, keypoints2;
Mat desc1, desc2;
feature->detectAndCompute(src1, Mat(), keypoints1, desc1);
feature->detectAndCompute(src2, Mat(), keypoints2, desc2);
Ptr<DescriptorMatcher> matcher = BFMatcher::create(NORM_HAMMING);
vector<DMatch> matches;
matcher->match(desc1, desc2, matches);
Mat dst;
drawMatches(src1, keypoints1, src2, keypoints2, matches, dst);
imshow("dst", dst);
imwrite("dst3.png", dst);
waitKey();
destroyAllWindows();
}
참고¶
- 지능자동화실제 과목, 박태형 교수
- ChatGPT